Ultraheli andur, Mootor, LED, Buzzer
Projekt mõõdab takistuse kaugust ultrahelianduri abil. Kui kaugus on väiksem kui 50, süttib punane LED, buzzer annab helisignaali ja mootori kiirus on 0.
Komponeendid:
Kaugusemõõtmise andur
Mootor
Piezo
LED
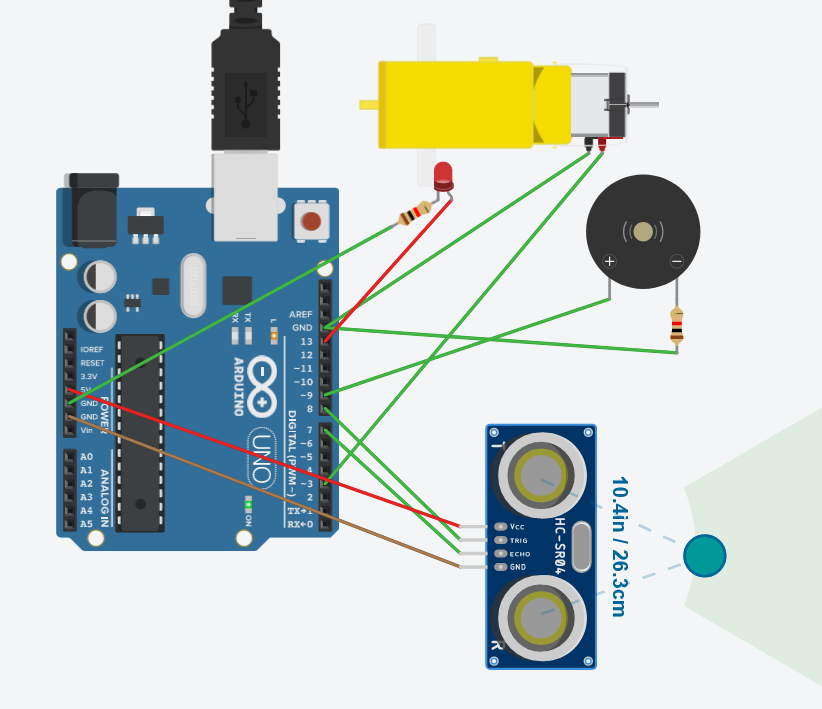
HC-SR04 ultraheli kaugusmõõtja on mõeldud täpseks kauguse mõõtmiseks.
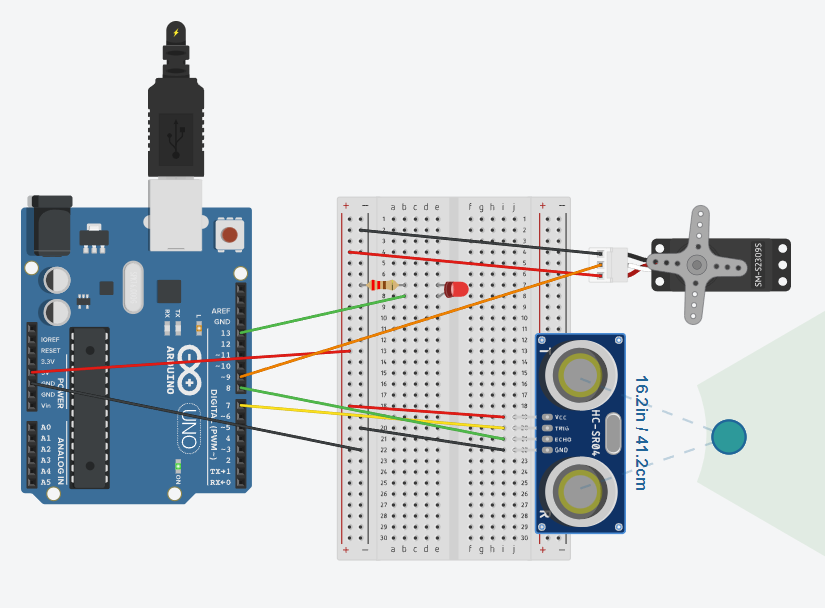
Данную схему можно использовать для открытия чего-либо при движении перед датчиком. Например та же копилка, в чей создании и заключалась цель, урна или шкаф
Я использовал в своей сборке: 10 проводов, резистор, LED, дистанционный сенсер и серво
video: https://drive.google.com/file/d/1j7IUiX0pk6-OQeYIbhvHw4cwcTl1keda/view?usp=sharing
#define ECHO_PIN 8
#define TRIG_PIN 7
#include <Servo.h>
Servo servo1;
int distance=1;
int LedPin=13;
int duration;
void setup(){
servo1.attach(9);
pinMode(ECHO_PIN, INPUT);
pinMode(TRIG_PIN, OUTPUT);
pinMode(LedPin,OUTPUT);
Serial.begin(9600);
}
void loop(){
digitalWrite(TRIG_PIN,LOW);
delay(200);
digitalWrite(TRIG_PIN,HIGH);
delay(200);
digitalWrite(TRIG_PIN,LOW);
duration = pulseIn(ECHO_PIN, HIGH);
distance=duration/58;
Serial.println(distance);
if (distance>50)
{
servo1.write(180);
digitalWrite(LedPin,0);
delay(1000);}
else
{
servo1.write(0);
digitalWrite(LedPin,250);
delay(1000);
}
}