Kasutatud komponentid:
2 mootorit, kaugusandur, arduino uno, L298N draiver, juhtmed ühendamiseks.
video: https://drive.google.com/file/d/1m-3BcUMD37_eoKS_Xelrfq6uMpW71ioo/view?usp=sharing
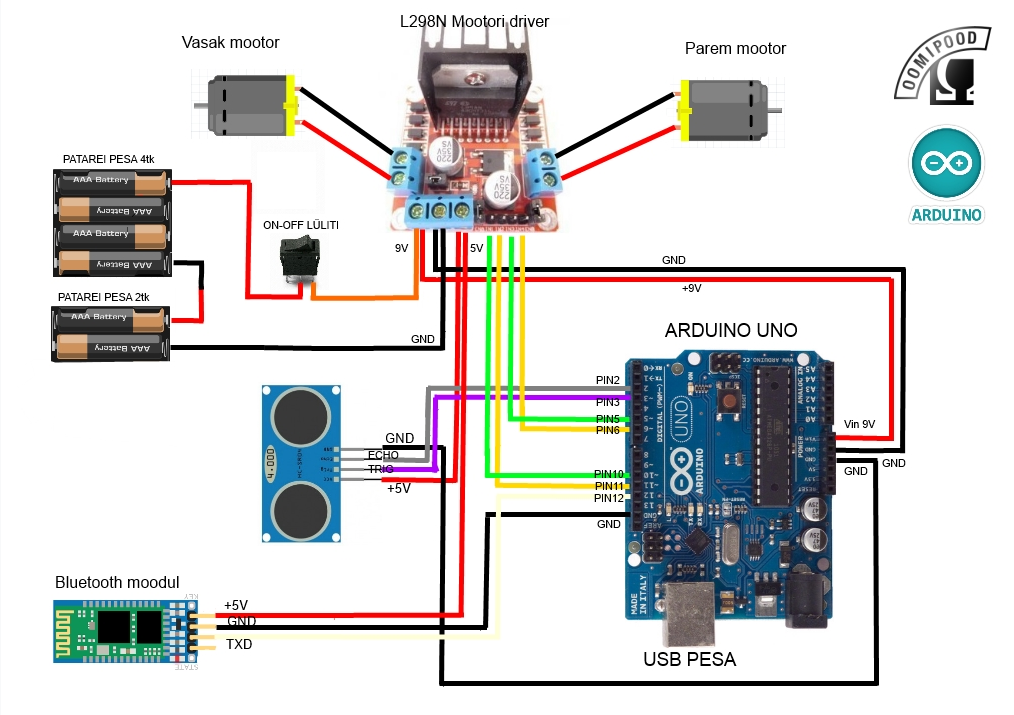
skeem:
//Robi v1.0
// Control of 2WD-1 robot platform using Arduino UNO.
// with obstacle avoidance using HC-SR04 ultrasonic sensor.
//DISTANCE VARIABLES
const int trigPin = 3;
const int echoPin = 2;
int dist_check1, dist_check2, dist_check3;
long duration, distance;
int dist_result;
//MOTORS VARIABLES
const int mot1f = 5;
const int mot1b = 6;
const int mot2f = 10;
const int mot2b = 11;
int mot_speed = 225; //motors speed
//LOGICS VARIABLES
const int dist_stop = 25;
const int max_range = 800;
const int min_range = 0;
int errorLED = 13;
//INITIALIZATION
void setup() {
Serial.begin(9600);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(errorLED, OUTPUT);
}
//BASIC PROGRAM CYCLE
void loop() {
autopilot();
}
//***********************FUNCTIONS*******************************
void autopilot() {
while (true) {
if (Serial.available() > 0) {
char command = Serial.read();
if (command == 'x') {
motors_stop();
return;
}
}
int result = ping(); //Check distance
if (result <= min_range || result >= max_range) { // Check range
digitalWrite(errorLED, HIGH);
delay(500);
} else if (result < dist_stop) { // Check stop range
digitalWrite(errorLED, LOW);
motors_back();
delay(1000);
motors_stop();
delay(200);
motors_left();
delay(300);
motors_stop();
delay(200);
} else { // If all is OK, go forward
motors_forward();
delay(100);
}
}
}
int ping() { //CHECK DISTANCE FUNCTION (3x)
long sum = 0;
for (int i = 0; i < 3; i++) {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration / 58;
sum += distance;
}
dist_result = sum / 3;
return dist_result;
}
void motors_forward() { //MOTORS FORWARD FUNCTION
analogWrite(mot1f, mot_speed);
analogWrite(mot2f, mot_speed);
digitalWrite(mot1b, LOW);
digitalWrite(mot2b, LOW);
}
void motors_back() { //MOTORS BACK FUNCTION
digitalWrite(mot1f, LOW);
digitalWrite(mot2f, LOW);
analogWrite(mot1b, mot_speed);
analogWrite(mot2b, mot_speed);
}
void motors_stop() { //MOTORS STOP FUNCTION
digitalWrite(mot1f, LOW);
digitalWrite(mot2f, LOW);
digitalWrite(mot1b, LOW);
digitalWrite(mot2b, LOW);
}
void motors_left() { //MOTORS LEFT FUNCTION
analogWrite(mot1f, mot_speed);
digitalWrite(mot2f, LOW);
digitalWrite(mot1b, LOW);
analogWrite(mot2b, mot_speed);
}
void motors_right() { //MOTORS RIGHT FUNCTION
digitalWrite(mot1f, LOW);
analogWrite(mot2f, mot_speed);
analogWrite(mot1b, mot_speed);
digitalWrite(mot2b, LOW);
}
void motors_forward_left() { //FORWARD LEFT FUNCTION
int k = mot_speed * 0.8;
analogWrite(mot1f, mot_speed);
analogWrite(mot2f, k);
digitalWrite(mot1b, LOW);
digitalWrite(mot2b, LOW);
}
void motors_forward_right() { //FORWARD RIGHT FUNCTION
int k = mot_speed * 0.8;
analogWrite(mot1f, k);
analogWrite(mot2f, mot_speed);
digitalWrite(mot1b, LOW);
digitalWrite(mot2b, LOW);
}
void motors_back_left() { //BACK LEFT FUNCTION
int k = mot_speed * 0.8;
digitalWrite(mot1f, LOW);
digitalWrite(mot2f, LOW);
analogWrite(mot1b, k);
analogWrite(mot2b, mot_speed);
}
void motors_back_right() { //BACK RIGHT FUNCTION
int k = mot_speed * 0.8;
digitalWrite(mot1f, LOW);
digitalWrite(mot2f, LOW);
analogWrite(mot1b, mot_speed);
analogWrite(mot2b, k);
}